turtlebot2-tutorials
Fiducial Markers
Fiducial markers can function as identifiers for robots, rooms, and objects, as well as serve tasks in augmented reality and 3d mapping.
AprilTags are a visual fiducial system that takes tags created from an ordinary printer. The AprilTag software can compute the 3D position, orientation, and identity of tags relative to the camera’s viewpoint.
Prequisites
This section requires the catkin_ws to be initialized and the turtlebot_dabit package created.
Please click here to learn how to initialize the catkin workspace
Installation
Installation should be done on both master and turtlebot computers
- Install the OpenCV and GCAL libraries
sudo apt install libopencv* libcgal-dev libcgal-qt5*
- Download, the apriltags-cpp opencv library
cd ~/workspacegit clone -b kinetic-devel https://github.com/dabit-industries/apriltags_cppmkdir apriltags_cpp/buildcd apriltags_cpp/buildcmake ..makesudo make install
- Download the apriltags library
git clone -b kinetic-devel https://github.com/dabit-industries/apriltags
- Build the apriltags packasge
cd ~/catkin_wscatkin_make
Print some AprilTags
To generate and print AprilTags, you can convert the postscript to a pdf, or you can use a postscript viewer such as gv.
For this tutorial, we will convert the postscript file to a pdf for printing.
The page number in the .pdf corresponds to the tag ID (eg. page 1 is tag ID 1)
- Convert the postscript file
36h11.psinto a pdf
This will create a 587-page long PDF with 587 different apriltags.cd ~/catkin_ws/src/apriltags/tags/ps2pdf 36h11.ps 36h11.pdf
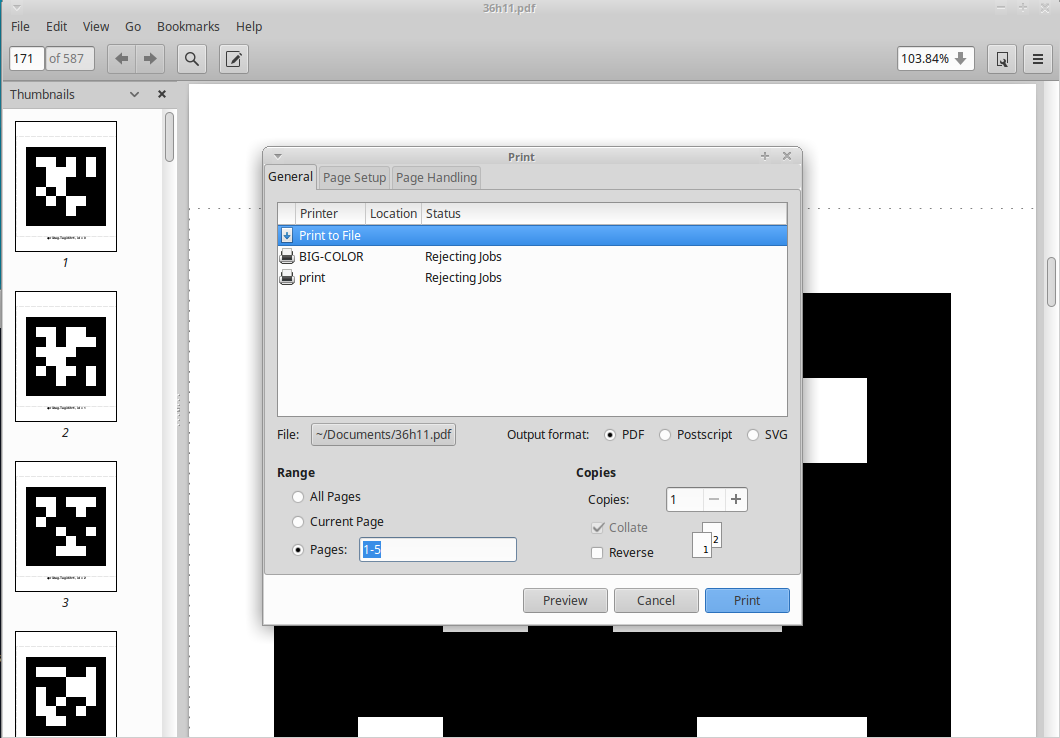
- Open the generated pdf, and print the first 5 pages
evince ~/catkin_ws/src/apriltags/tags/36h11.pdf- Go to File>print
- Under Range click pages and type
1-5
- Under Range click pages and type
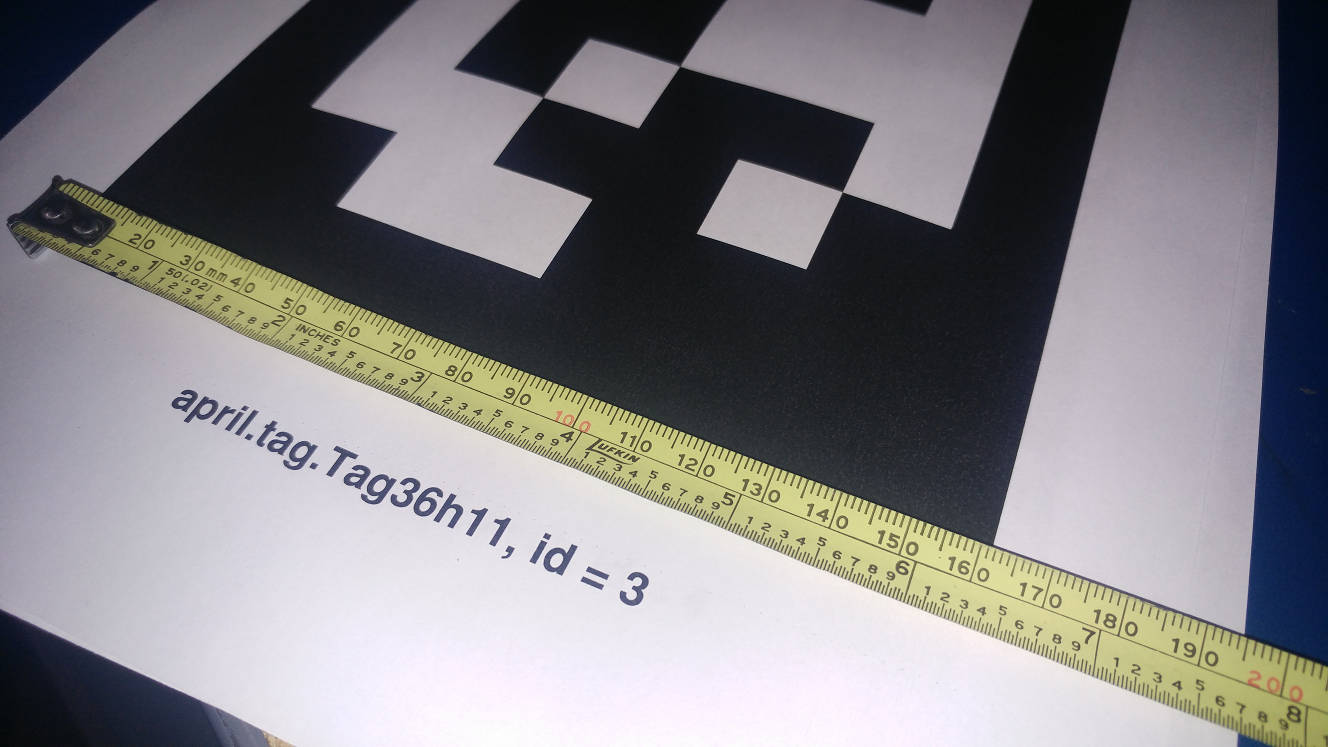
Measure the AprilTags
!! This step is not neccesary if you are printing on standard letter paper with the steps above.
With the steps above, the width measurement is 161mm
In order to have accurate tag localization, you need to get the width of the tag in millimeters:
- Take one of the tags, and lay it on a flat surface
- With a ruler or tape measure, measure the width of the tag box
Create a launch file
- Create a new launch file in your turtlebot_dabit/launch directory:
cd ~/catkin_ws/src/turtlebot_dabit/launchgedit fiducial.launch
```xml
```
Running the fiducial marker launch
- On the turtlebot laptop, open a new terminal:
source ~/catkin_ws/devel/setup.shroslaunch turtlebot_dabit fiducial.launch
View the apriltag detections
You can view the apriltag detection window on either the turtlebot or master laptop.
- Open a new terminal:
source ~/catkin_ws/devel/setup.shrosrun rqt_image_view rqt_image_view image:=/apriltags/detections_image
Get tag ID and position of markers
On either the turtlebot or master laptop:
- Open a new terminal:
source ~/catkin_ws/devel/setup.shrostopic echo /apriltags/detections
Troubleshooting
Sometimes catkin_make fails. You have to run catkin_make again after it fails.
If you get an error message about ROS MESSAGES, source the catkin_workspace setup: source ~/catkin_ws/devel/setup.sh