turtlebot2-tutorials
Turtlebot Bringup
The Turtlebot Bringup package contains all the neccesary configuration and launch files for loading the Turtlebot drivers.
The minimal.launch file starts up the Kobuki base drivers and the basic Turtlebot configuration settings for ROS.
- Load the minimal.launch file
- On the Turtlebot computer, open a new terminal and type:
roslaunch turtlebot_bringup minimal.launchYou should hear a chime from the Kobuki once ROS has connected to it.
- On the Turtlebot computer, open a new terminal and type:
Orbbec Astra Bringup
You can bring up the Orbbec Astra drivers by using the 3d_sensor launch file located in the turtlebot_bringup package
- Load the 3dsensor.launch file
- On the Turtlebot computer, open a new terminal and type:
roslaunch turtlebot_bringup 3dsensor.launch
- On the Turtlebot computer, open a new terminal and type:
Seeing Orbbec Astra data
You can view data from the Orbbec Astra using the rqt_image_view program.
- On the master computer, open a new terminal and type:
rosrun rqt_image_view rqt_image_view image:=/camera/rgb/image_rawAstra Topics:
| Topic | Description |
|---|---|
| /camera/depth/* | Depth Image |
| /camera/ir/* | 2D infrared image |
| /camera/image_raw/* | raw RGB image |
Testing Kobuki
- Launch the GUI to check out the Kobuki status
- From the master computer, open a new terminal and type:
roslaunch turtlebot_dashboard turtlebot_dashboard.launchIf everything is OK, it should look like this:
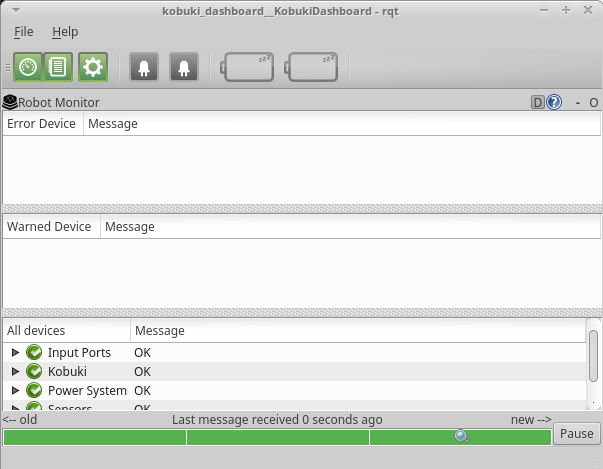
- From the master computer, open a new terminal and type:
You may need to press the button that looks like a speedometer to show the Robot Monitor output.
