turtlebot2-tutorials
Network Setup
Connect to a Wireless, Ethernet, or Cellular network using the Network Manager (upper right corner of desktop).
Using the hostname command in Linux, we are able to dynamically load the IP of the computer that will be on the Turtlebot so that less configuration is needed.
- You can find the IP of a computer by opening a terminal and typing:
hostname -I - Add the network parameters to your BashRC for the turtlebot computer
(bashrc is a file that configures the Linux shell environment)- Open a new terminal on the turtlebot computer and type the following:
(Breakdown of commands explained in the next section of this document)echo export ROS_MASTER_URI=http://\$\(hostname -I\):11311 >> ~/.bashrc echo export ROS_IP=\$\(hostname -I\) >> ~/.bashrc echo export ROS_HOSTNAME=\$\(hostname -I\) >> ~/.bashrc echo export ROS_HOME=\~/.ros >> ~/.bashrc(The backwards slash
\is an escape character in a Linux terminal shell)
- Open a new terminal on the turtlebot computer and type the following:
- Add the network parameters to your BashRC for the master computer:
- Open a new terminal on the master computer, and type the following:
(ReplaceIP_OF_TURTLEBOTwith the ip found in step1)echo export ROS_MASTER_URI=http://IP_OF_TURTLEBOT:11311 >> ~/.bashrc echo export ROS_IP=\$\(hostname -I\) >> ~/.bashrc echo export ROS_HOSTNAME=\$\(hostname -I\) >> ~/.bashrc echo export ROS_HOME=\~/.ros >> ~/.bashrc
- Open a new terminal on the master computer, and type the following:
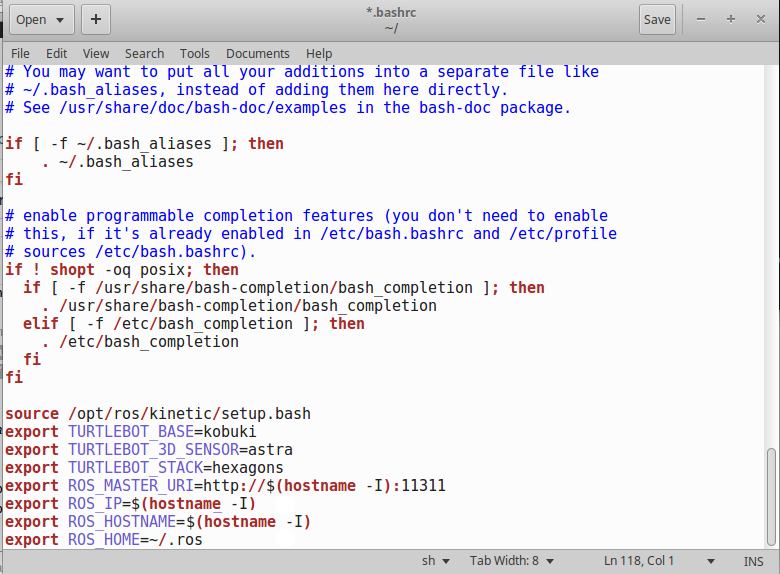
- Verify that the commands have been properly and printed to the bashrc file:
- Open a new terminal on both the master computer and the turtlebot computer
gedit ~/.bashrc- Scroll all the way down, and verify that the end of the file looks like this:
- Open a new terminal on both the master computer and the turtlebot computer
- Load the new environment variables above into your active terminal window
- On both Master and Turtlebot computers, open a terminal and type:
source ~/.bashrc
- On both Master and Turtlebot computers, open a terminal and type:
Command Breakdown
echo export ROS_MASTER_URI=http://\$\(hostname -I\):11311 >> ~/.bashrc
echo is a Linux command that prints text to a designated output (default is the terminal)
export is a Linux shell command that handles variables in the shell environment
ROS_MASTER_URI is the network address for a ROS instance to contact a ROS Master Server
http://\$\(hostname -I\):11311 sets the designated network address using the current IP found by the hostname command, and the \ are escape characters to prevent the hostname command from being run in the terminal
>> ~/.bashrc tells the echo command to send the output to the file ~/.bashrc
echo export ROS_IP=\$\(hostname -I\) >> ~/.bashrc
echo is a Linux command that prints text to a designated output (default is the terminal)
export is a Linux shell command that handles variables in the shell environment
ROS_IP is the network address for a ROS instance to contact a ROS Master Server
\$\(hostname -I\) sets the designated network address using the current IP found by the hostname command, and the \ are escape characters to prevent the hostname command from being run in the terminal
>> ~/.bashrc tells the echo command to send the output to the file ~/.bashrc
echo export ROS_HOSTNAME=\$\(hostname -I\) >> ~/.bashrc
echo is a Linux command that prints text to a designated output (default is the terminal)
export is a Linux shell command that handles variables in the shell environment
ROS_HOSTNAME is the name of the computer on a network, used for communication on a local network
\$\(hostname -I\) sets the designated network name using the current hostname found by the hostname command, and the \ are escape characters to prevent the hostname command from being run in the terminal
>> ~/.bashrc tells the echo command to send the output to the file ~/.bashrc
echo export ROS_HOME=\~/.ros >> ~/.bashrc
echo is a Linux command that prints text to a designated output (default is the terminal)
export is a Linux shell command that handles variables in the shell environment
ROS_HOME is the environment variable for the location of the ROS home folder
\~/.ros is the directory in Linux for the location of the ROS home folder
Network Testing
ROS requires completely free network connectivity between the Turtlebot and the Master computer.
- Test the Ping command between the Master and the Turtlebot:
- On the master computer, open a new terminal:
ping IP_OF_TURTLEBOT- You should see the following returned if the Turtlebot is on the network:
PING IP_OF_TURTLEBOT (IP_OF_TURTLEBOT) 56(84) bytes of data. 64 bytes from IP_OF_TURTLEBOT: icmp_seq=1 ttl=64 time=66.8 ms
- On the master computer, open a new terminal:
- Try connecting to the ROS Master server hosted on the Turtlebot
- On the Turtlebot, open a new terminal and type:
roscore
- On the master computer, open a new terminal and type:
rostopic list
- If successful, you should see the following output:
/rosout /rosout_agg
- On the Turtlebot, open a new terminal and type:
Troubleshooting
If your laptop cannot connect to the network, ensure that you installed the proprietary drivers.
If you continue to have issues, check out the ROS Network Setup Page